
Videos
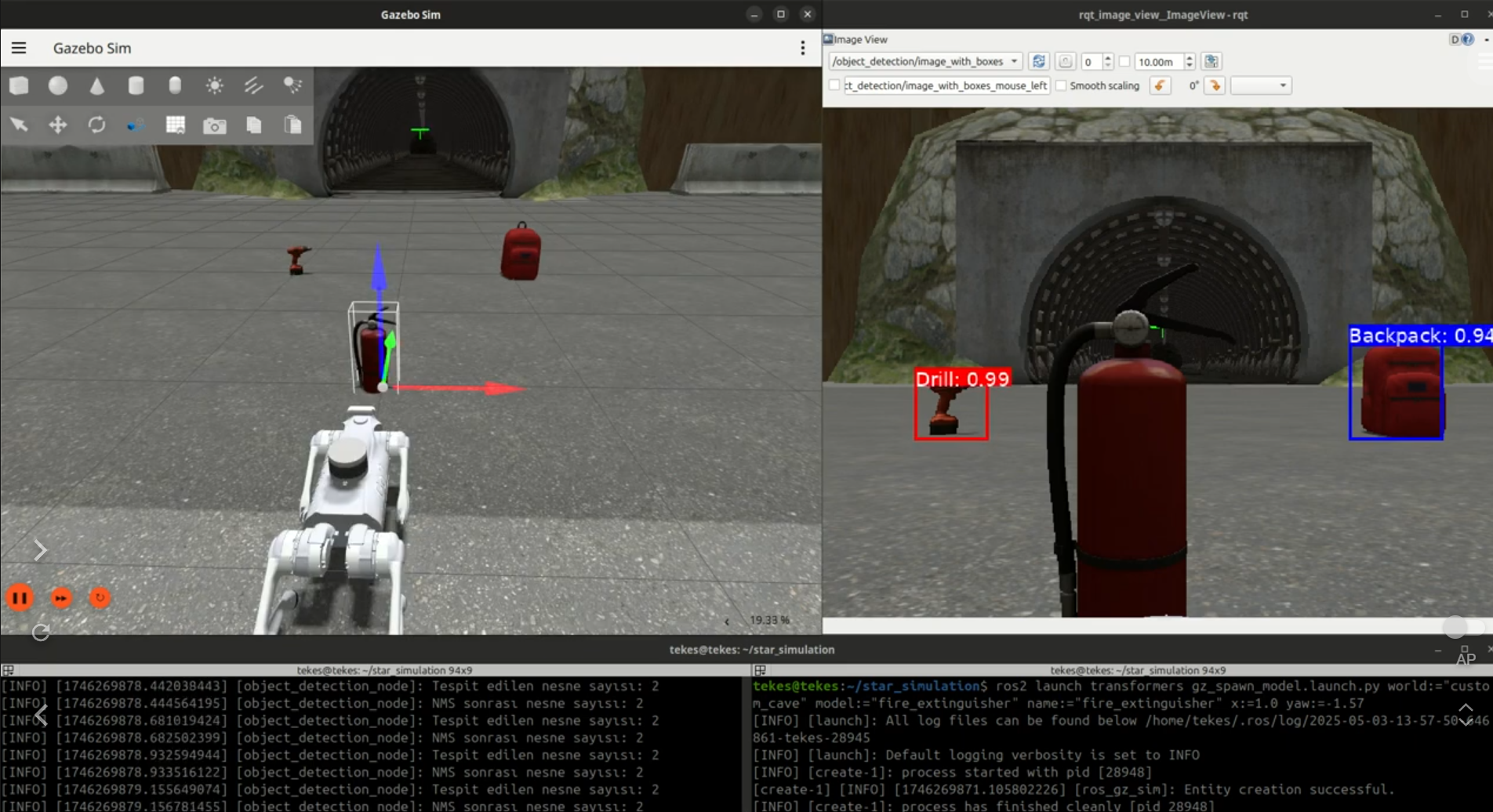
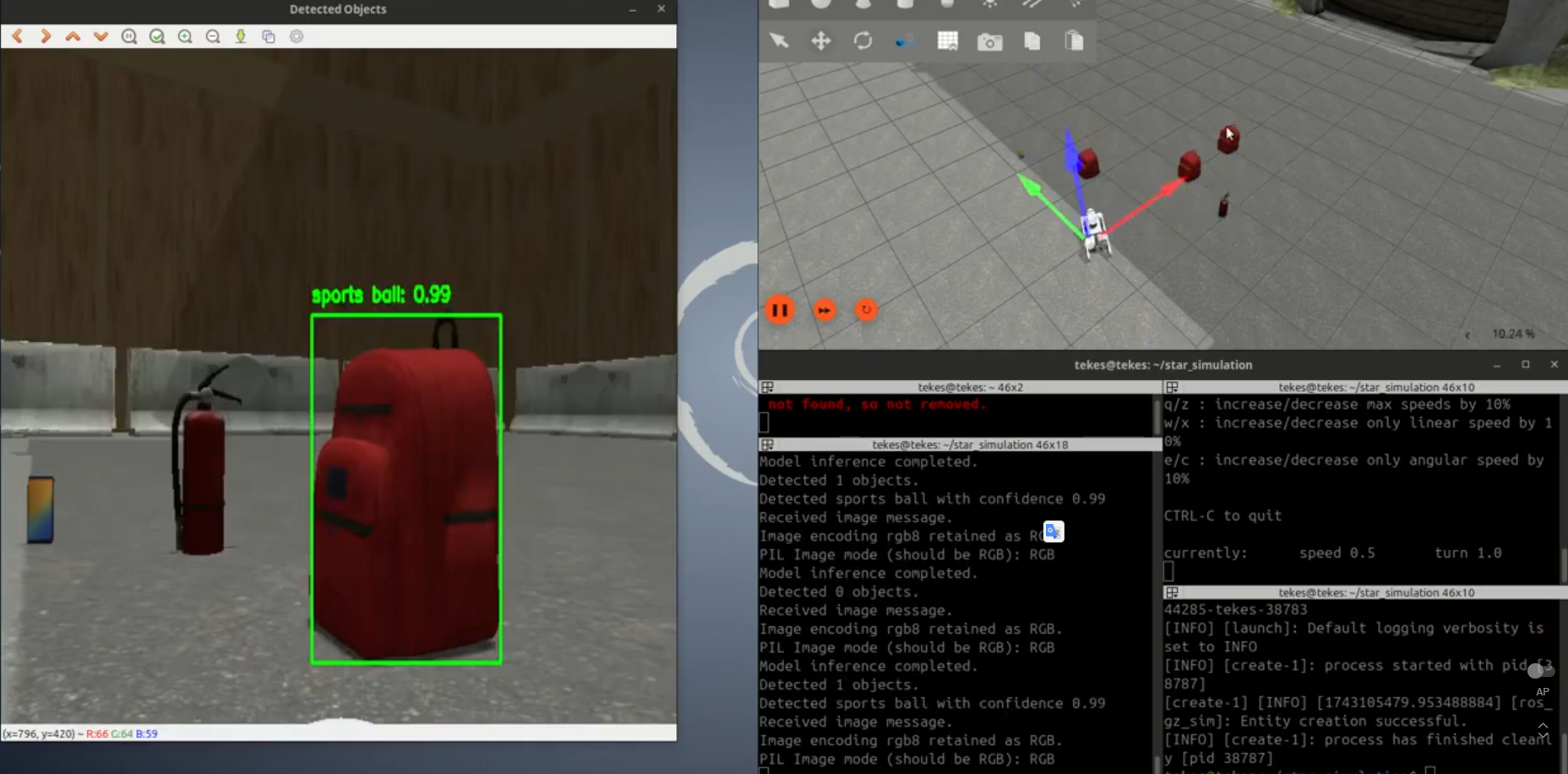
OBJECT DETECTION WITH DETR AT SIMULATION ENVIRONMENT GAZEBOSIM HARMONIC ROS2 JAZZY-V2
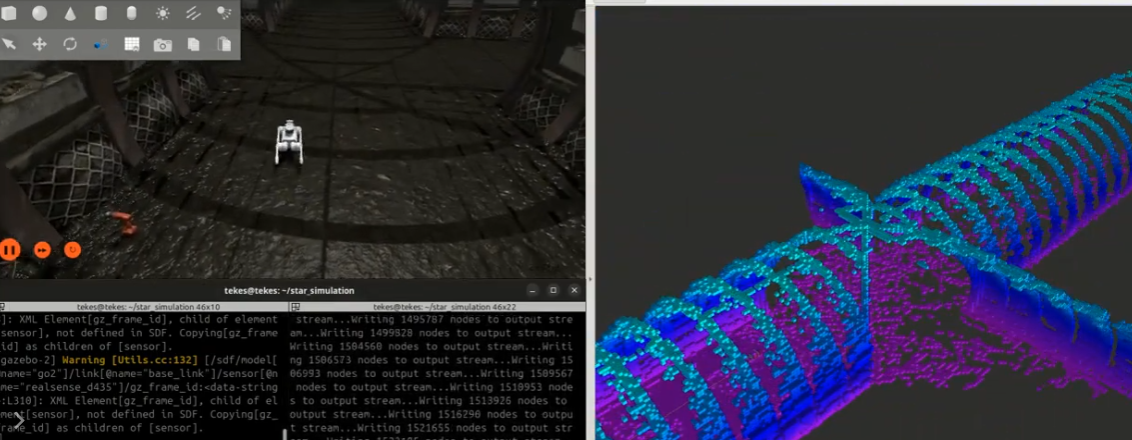
3D MAPPING WITH OCTOMAP GO2 QUARUPED ROBOT
OBJECT DETECTION WITH DETR AT SIMULATION ENVIRONMENT GAZEBOSIM HARMONIC ROS2 JAZZY
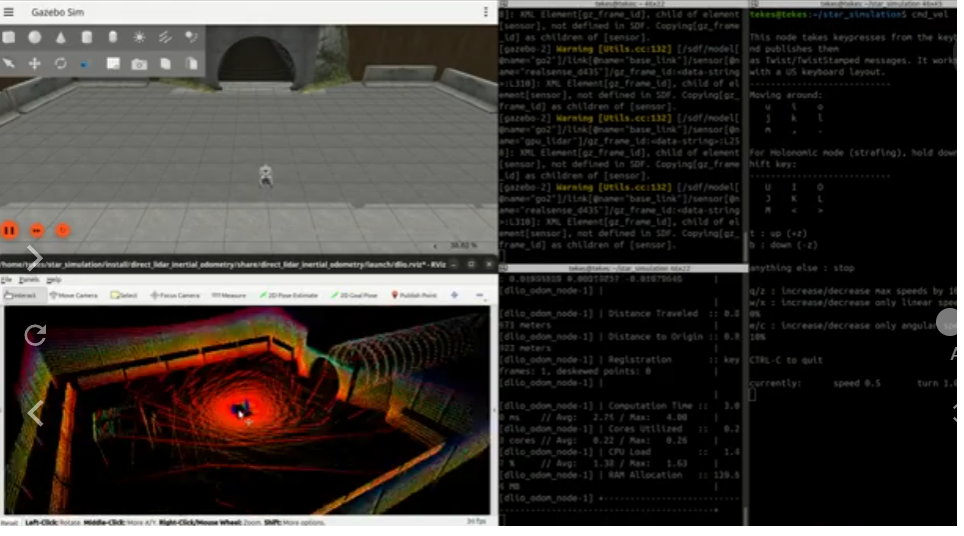
D LIO WITH UNITREE GO2 QUADRUPED ROS2 JAZZY GAZEBO HARMONIC
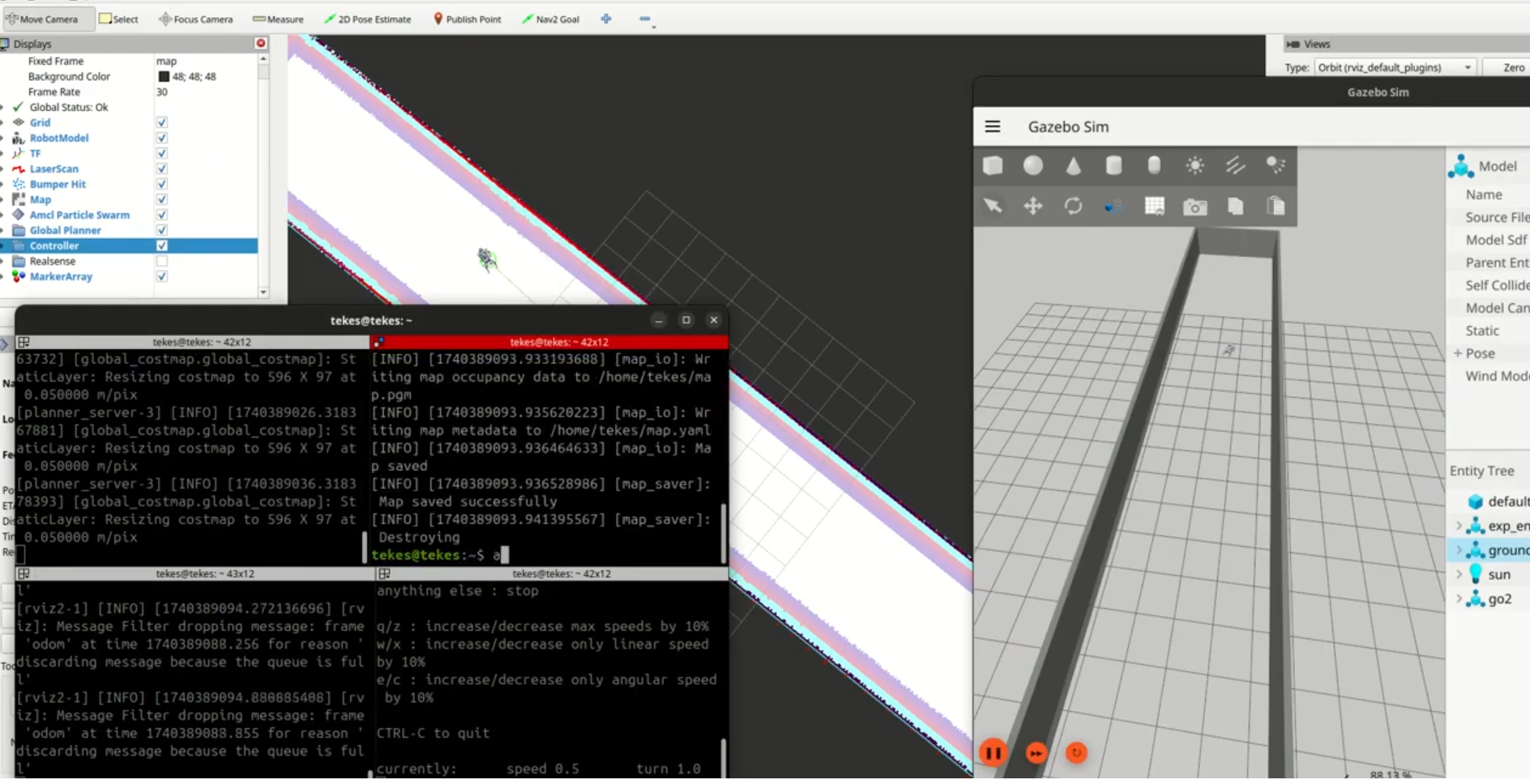
SIMULATING A QUADRUPED ROBOT GO2 WITH SLAM TOOLBOX IN GAZEBO SIM HARMONIC ROS2 JAZZY
X3 DRONE SLAM SIMULATION IN GAZEBO HARMONIC WITH RTAB MAP & ONLY 3D LIDAR ROS2 JAZZY

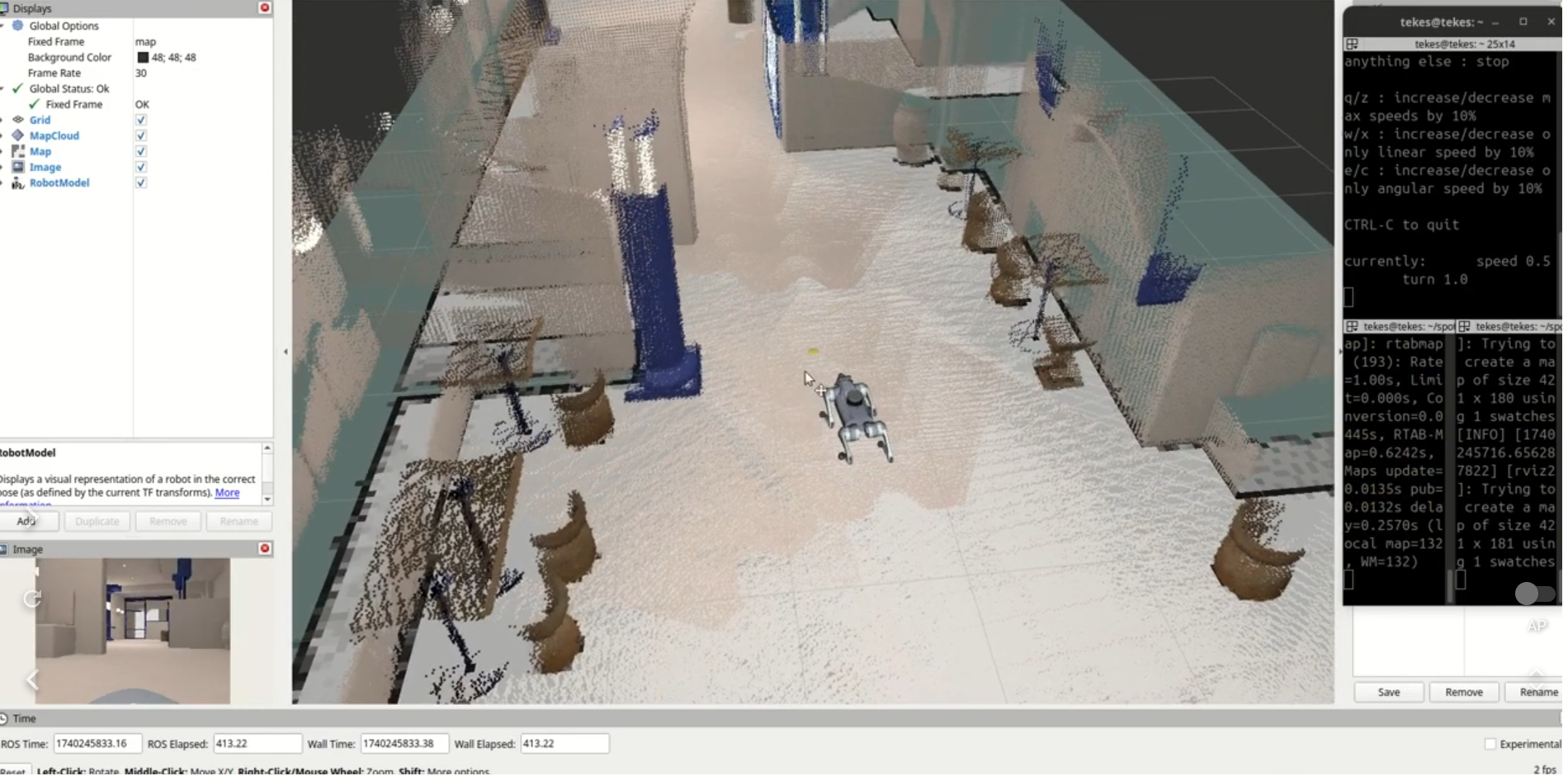
QUADRUPED ROBOT GO2 SIMULATION AND SLAM WITH RTAB MAP IN GAZEBOSIM HARMONIC & ROS2 JAZZY
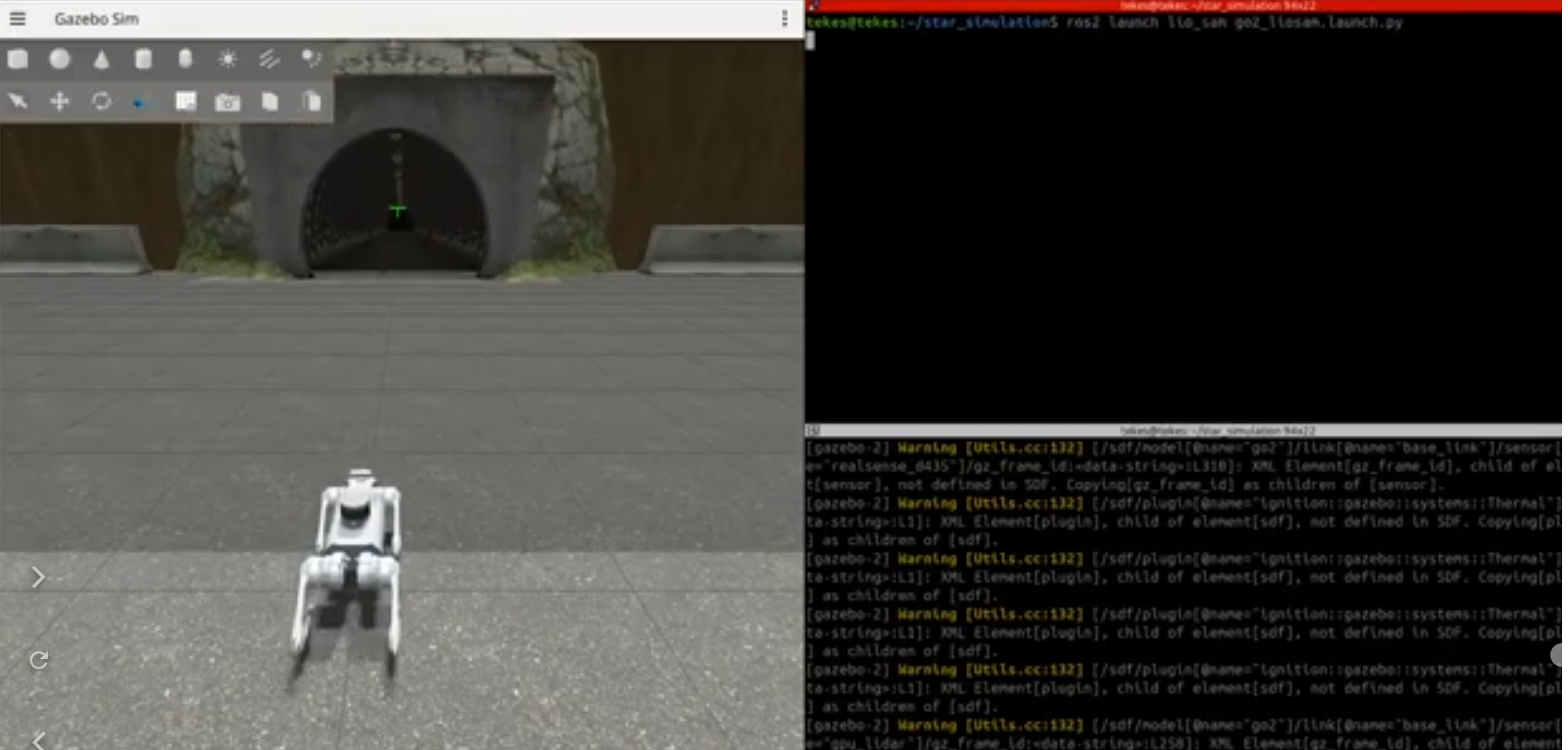
LIO-SAM WITH UNITREE GO2 (QUADRUPED) | ROS2 JAZZY | GAZEBO HARMONIC
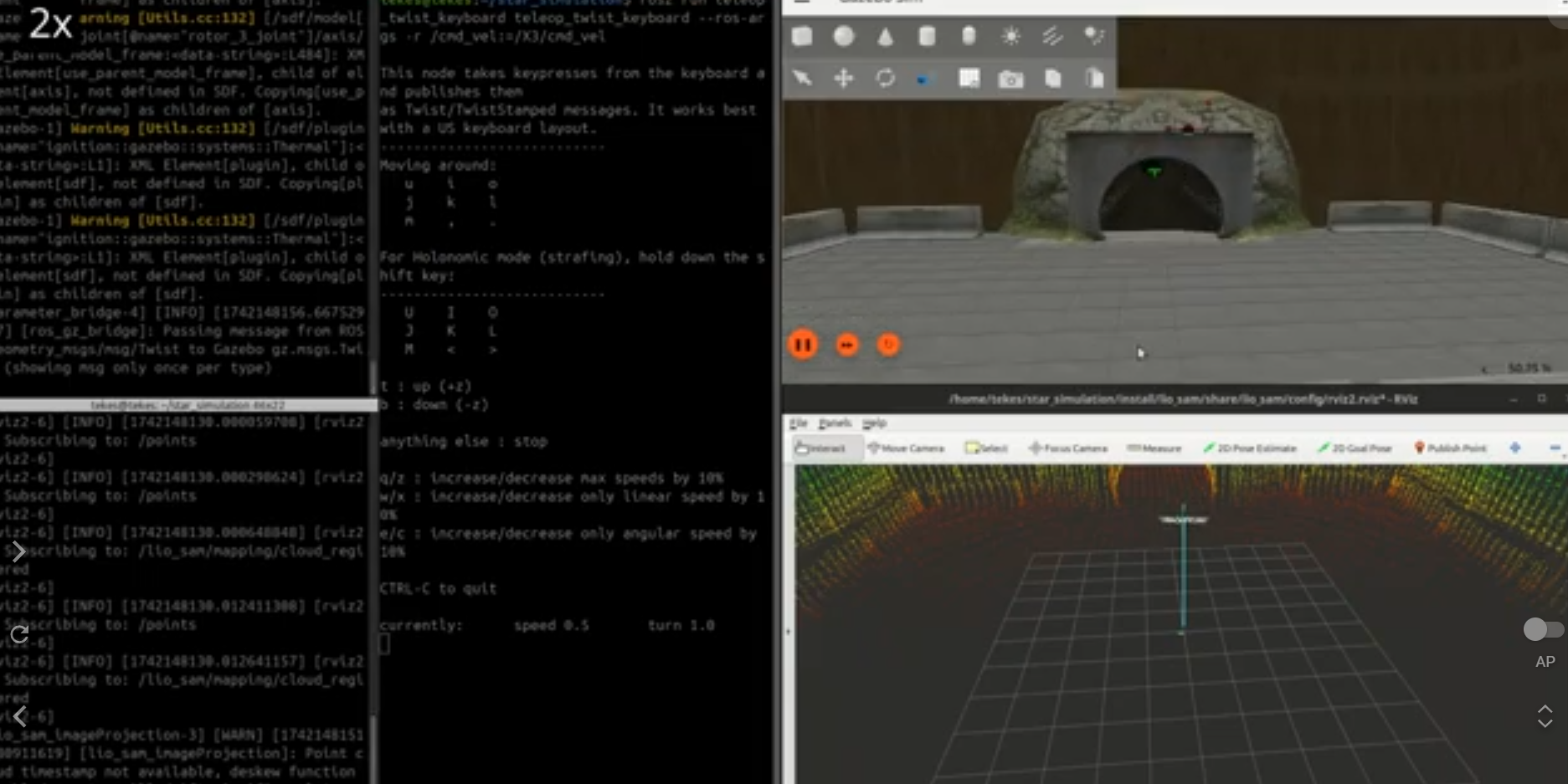
LIO SAM WITH X3 DRONE AT GAZEBO SIM HARMONIC ROS2 JAZZY
ROBOTIS-OP3 POLYNOMIAL GAIT GENERATION

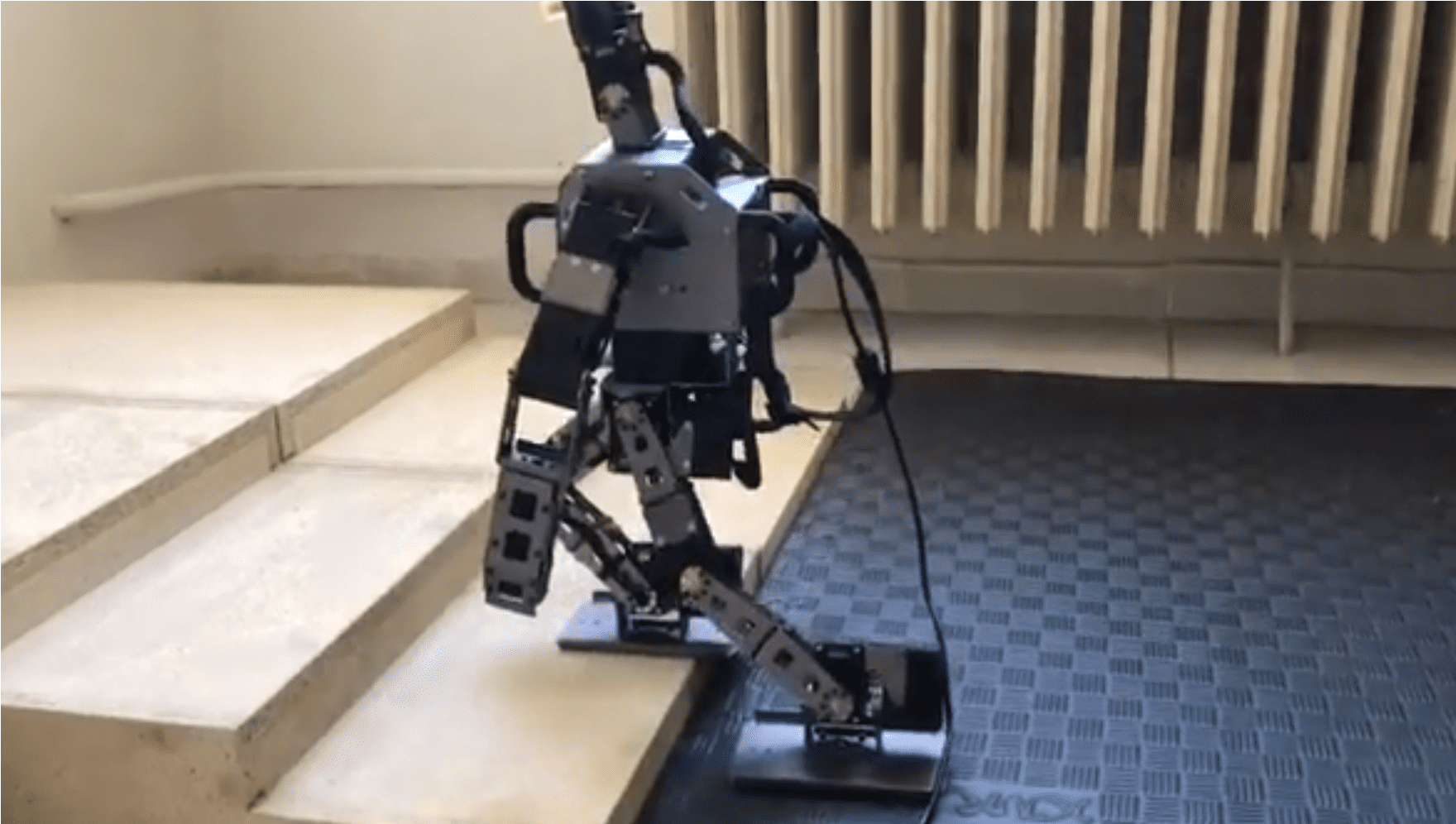
ROBOTIS-OP3 TERRAIN ADAPTIVE LOCOMOTION
ROBOTIS-OP3- VISION BASED IMITATION BY USING CNN

ROBOTIS-OP3 LOCOMOTION IN WEBOTS
ROBOTIS-OP3 OBSTACLE AVOIDANCE
ROBOTIS-OP3 STORAGE BOX MANIPULATION

ROBOTIS-OP3 SPONGE MANIPULATION
ROBOTIS-OP3 GLASS MANIPULATION


ROBOTIS-OP3 PINE CONE MANIPULATION
ROBOTIS-OP3 BOX MANIPULATION IN WEBOTS

ROBOTIS-OP2 BOX MANIPULATION-1-(REINFORCEMENT LEARNING USING VISION)

ROBOTIS-OP2 BOX MANIPULATION-2-(REINFORCEMENT LEARNING USING VISION)
ROBOTIS-OP2 BOX MANIPULATION-3-(REINFORCEMENT LEARNING USING VISION)

ROBOTIS-OP2 BOX MANIPULATION IN WEBOTS-(REINFORCEMENT LEARNING USING VISION)

Quick Access