
Previous/Current Projects
Next Level Autonomy Development for Fast and Robust Disaster Management using Heterogeneous Robots having Multi-sensors in Unstructured GPS-Denied Environments: Fielded Human-Robot Interaction, Multi-Robot Exploration and Object Searching. 1 April 2024-2027. Tubitak 1001, (grand no:123E406), Project Supervisor .


Design of Voice and GPS Controlled Smart Robotic Wheelchair for Patients with Spinal Disorders, 2023-Aug 14 2024.
Innovative Design of Smart Load-Carrying Vehicle for Human-Centric Industry 5.0, 2023-
Modeling and Autonomous Control of an Unmanned Aerial Vehicle, 2021-2023

Design and Remote Control of a Flapping Wing Unmanned Aerial Vehicle, 2021- 2022

“Development of a New Deep Learning Algorithm for the Training of Humanoid Robots”, The Scientific and Technological Research Council of Turkey (Tubitak)-1003, (grant no. 117E589), December 2017-2020.

Visual-Based Control of an Autonomous Ground Vehicle Equipped with Lidar and Camera, 2018.


Human Tracking and Path Planning with an Intelligent and Autonomous Unmanned Aerial Vehicle, 2018.
Realization of FPGA-Based Real-Time Image Processing and Object Recognition Algorithms, 2018.
Development of Perception System for Autonomous Vehicles by Using GPU-based Learning, 2018
Simultaneous Localization and Mapping (SLAM) for Mobile Robots using RP Lidar and Kinect Sensor, 2016.

Object Detection by using FPGA and Matlab, 2016.
Efficient Android Electronic Nose Design for Recognition and Perception of Fruit Odors, 2016.
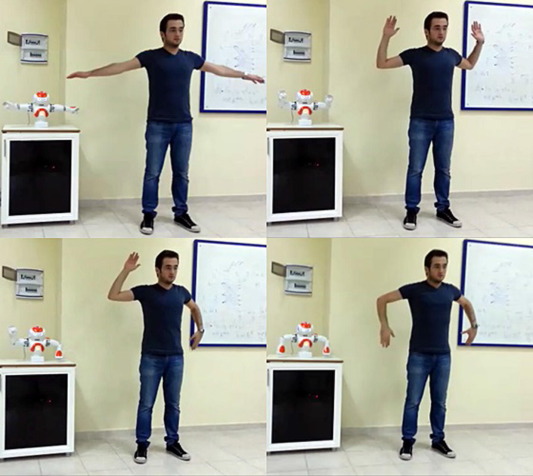
Human Robot Interaction with Nao Robot Platform, 2014.
Quick Access